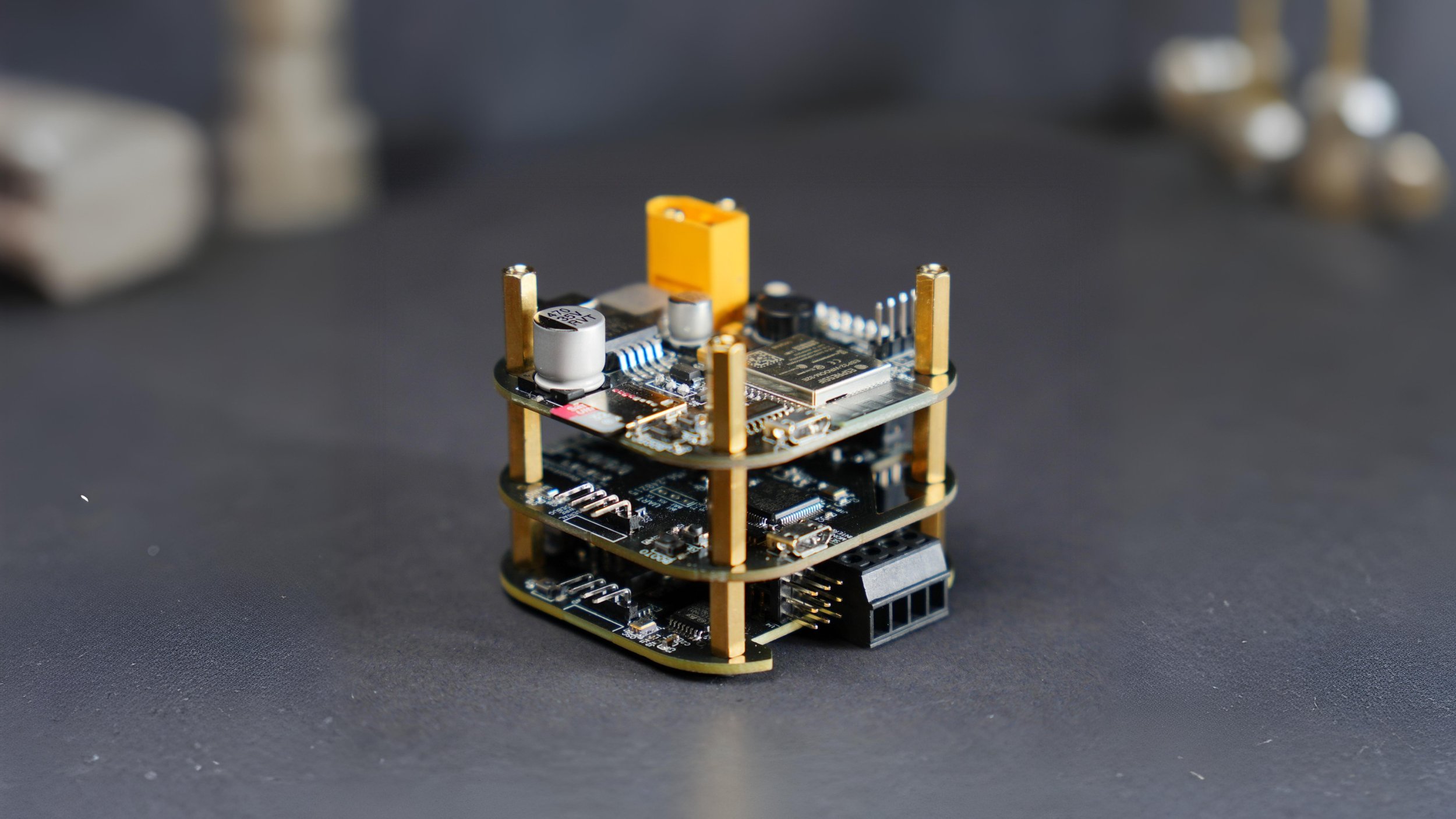
Buffalo Stack
The modular flight controller that handles tedious sensor integration for you - so you can focus on what matters: flight logic.
The Modular Architecture Behind Buffalo Stack
The Current Trade-off
Today, building a flying platform — whether a model rocket, quadcopter, or fixed-wing drone — typically forces a choice.
You either build everything from scratch using Arduino-based systems and breakout boards, spending months integrating sensors, debugging hardware, and implementing your own flight software.
Or you use a fully integrated flight controller such as Pixhawk-class systems, which are reliable and fast to deploy, but limit how much you can adapt the underlying architecture.
As a result, most builders face the same trade-off: you either lose flexibility or you lose speed.
Buffalo Stack is the Third Option.
A modular flight architecture that removes the need to repeatedly implement low-level sensor integration, so you can focus on building and iterating your system instead of rebuilding the same foundations for every project.
We’re not building Buffalo Stack in isolation.
We’re building it with the people who will actually use it.
Early builders help define which capabilities matter most in the first release — from Core performance priorities to Fusion’s sensor properties to the actuators the Act board should be able to control.